Testet kniver for robotbruk

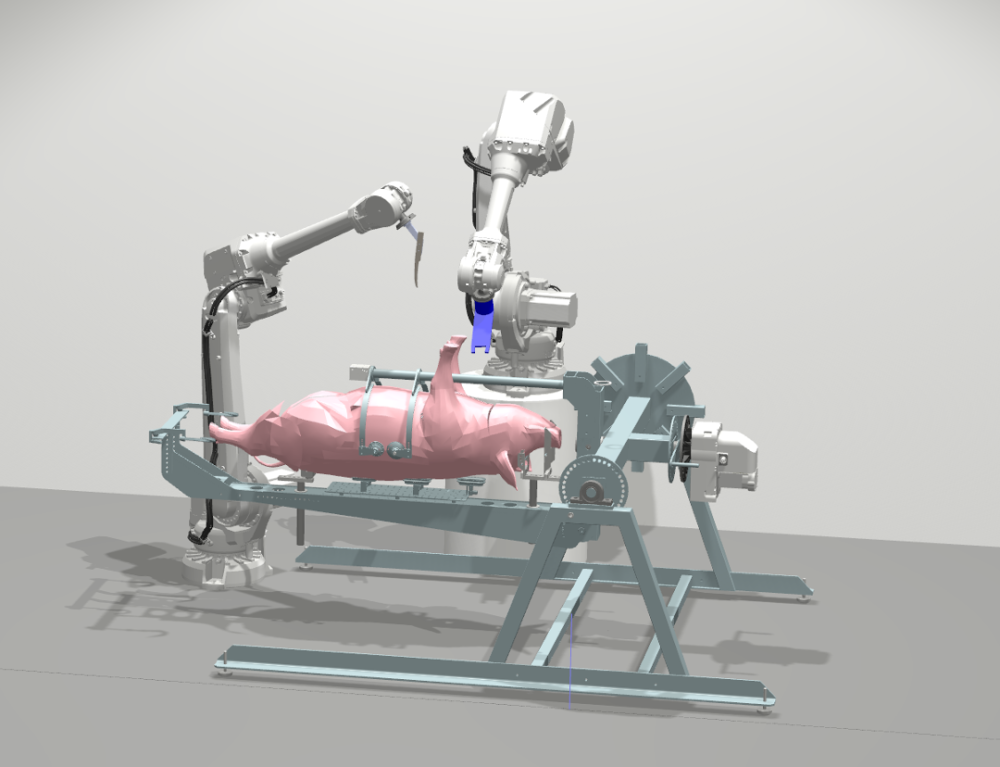
Roboten må lære å skjære ved at den profesjonelle kjøttskjærerens bevegelser analyseres ved bruk av kunstig intelligens. Her tester roboten Uddeholmkniven. Fotograf: Animalia
I det pågående innovasjonsprosjektet RoBUTCHER er hensikten å skape en arbeidsstasjon der en robot bruker forskjellige verktøy til å skjære ned en gris utenifra og inn. For å gjennomføre dette trengs en kniv som kan utføre detaljerte, følsomme nedskjæringer og imitere bevegelsene til en profesjonell kjøttskjærer.
I arbeidet med å velge riktig kniv til RoBUTCHER, ble ulike metoder for å teste knivens evner vurdert. Både ballistisk gele og stabler med papir var oppe til vurdering av materialer som kunne si noe om knivens egenskaper. Til slutt falt valget på forskjellige typer kjøttmateriale. Det var viktig at materialet var så uniformt som mulig for å kunne vurdere knivene ut ifra like betingelser.
Prøvde fire ulike kniver
I prosjektet ble fire ulike kniver vurdert. De har ulik oppbygning, skjæreegenskaper og funksjonalitet. En av knivene er en vibrerende kniv. Det vil si at knivbladet beveger seg frem og tilbake 20 000 ganger i sekundet. Dette reduserer skjærekraften betydelig og gjør det mulig å foreta nøyaktige kutt gjennom områder med ulik tetthet og konsistens. Den vibrerende kniven gjorde det også mulig å skjære svært tynne skiver, kjøttet klistret seg ikke til knivbladet, og de avskårne delene ble ikke klemt sammen da det ikke er behov for særlig press på kniven. Andre kniver som ble testet var spesiallagede knivblader av stålet Vanadis fra stålprodusenten Uddeholm. Fordelen med denne kniven er at stålet er spesielt hardt og egner seg derfor godt til bruksområder der slitasje og flisdannelse på eggen er utfordrende problemstillinger. Denne kniven ble produsert etter spesielle kriterier utarbeidet av prosjektgruppen i RoBUTCHER. Her er vinkel på knivsegg, feste for knivskaft og lengde på knivblad nøye vurdert. Med andre ord har svært ulike kniver blitt testet i prosjektet.
Robot og manuell skjæring
Den profesjonelle kjøttskjærerens rolle i prosjektet er avgjørende for å lære roboten å skjære på en måte som er akseptabel for bransjen og forbrukeren. Roboten får instruks for hvordan et godt snitt skal utføres på slaktet ved å analysere slakterens bevegelser ved bruk av kunstig intelligens.
Testen av knivene foregikk ved at en kjøttskjærer og en robot utførte samme kutt på forskjellige stykningsdeler av kjøtt. Roboten skulle skjære et enkelt snitt igjennom materialet med de ulike knivene. Kjøttet som var skåret av roboten og referansestykkene skåret av kjøttskjæreren ble merket og fotografert. Bildene ble så vurdert av et ekspertpanel som skulle se på kvaliteten av snittflaten uten at de visste hvem som hadde utført snittet. De skulle også vurdere om de kunne se om snittet var utført av en robot eller et menneske, eller om det ikke var mulig å skille mellom disse.
Foreløpige resultater tyder på at knivene presterer relativt likt og at det er vanskelig å skille skjæreegenskapene mellom robot og menneske. Videre i prosjektet blir det viktig å teste for eksempel slitasje på kniven og mulighetene for videre finskjæring.
RoBUTCHER
Prosjektet startet i januar 2020 og avsluttes i 2023.
Prosjektet har mottatt 7,5 millioner euro gjennom EUs forskning og innovasjonsprogram Horizon 2020.
Prosjektet ledes av NMBU, og i tillegg deltar:
- Animalia
- Óbuda University (Ungarn)
- Teknologisk Institut (Danmark)
- Max Rubner-Institut (Tyskland)
- NORSUS
- Byte Motion (Sverige)
- Ciklum (globalt)
- RobotNorge
- FACCSA (Spania)
Les mer på robutcher.eu